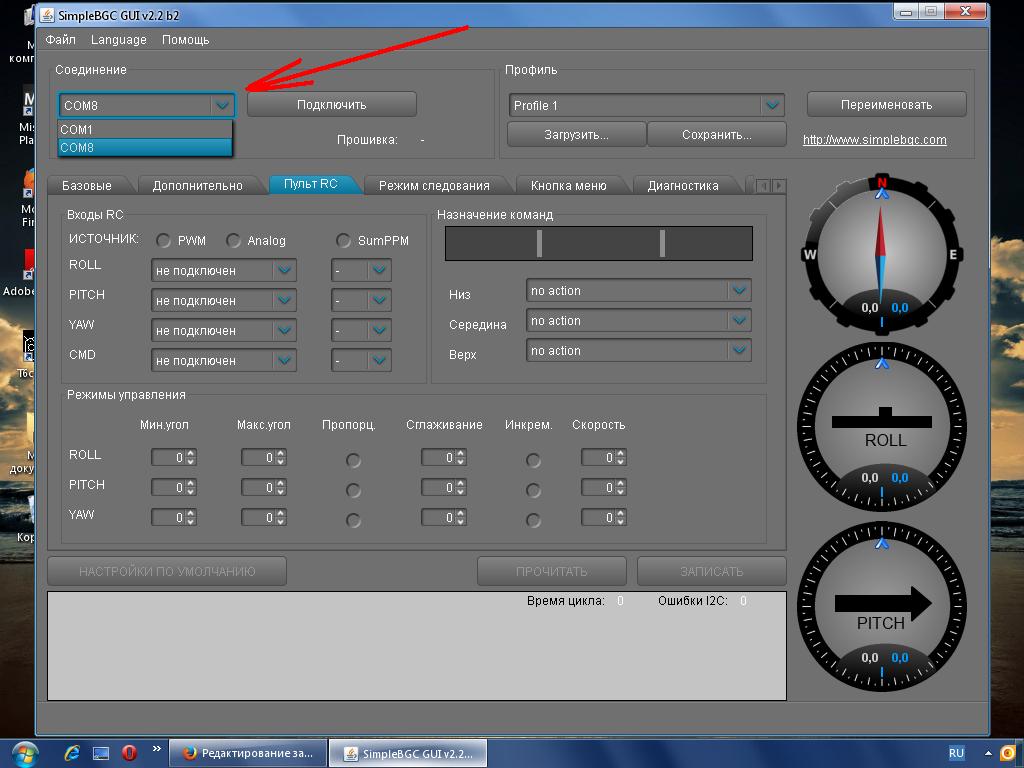
Устанавливаем драйвер на компютер затем устанавливаем програмку скачаную раньше 2.2b2 Подключаем подвес к ПК я использую USB шнур от телефона NOKIA Ставим нужный COM PORT в моем случае это COM8 Затем нажимаем "Подключить"
После подключения к программе подвеса необходимо сделать калибровку. Устанавливаем подвес на квадрокоптер, на подвесе должна быть камера отбалансирована оси подвеса. После этого нажимаем "Калиб Аксель" через секунд 10 "Калиб Гиро" при этом можно питания подвесу не подключать. Все базовые настройки PID можно оставить, как показали мне тесты подвес отлично с ими работает.
В вкладке "Пульт RC" можем настроить наклоны подвеса управляя ручками на передатчике. Я подключил шнур с разъемами JST к приемнику и подвесу, естественно в свободные каналы на приемнике после этого необходимо настроить на эти каналы ручки на передатчике.
В подменю "Дололнительно" необходимо установить такие значения как на фото ниже:
"Датчики" это функция реверса, если подвес отклоняется в противоположную сторону в функции это все можем перестроить значениями.
На этом все я рассказал базовые настройки подвесв и дал ссылки для скачки программы и драйвера. Тесты показали что подвес отлично справляется со своей задачей. Минус подвеса это вес 210 грам
Правила работы с подвесом: Не подключать без установленной камеры. Не давать биение подвеса что может привести к сгоранию регулятора на мотор, тоесть крайние угловые положения подвеса, за которые не стоит выходить при эксплуатации ... Питание подвеса 8-13V (На плате подвеса установлен стабилизатор напряжения) Вот такую камеру установили на подвес. http://www.banggood.com/SJcam-S....S-Sport